


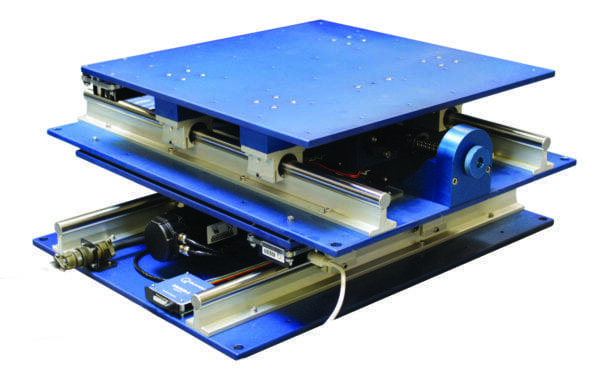
SHAKE TABLE II XY
진동대 진동 테이블 II XY
- ● 2x Quanser Q8-USB
- ● 2x Quanser QPIDe
특징
이중 축 작동
여러 설정 변형 (XY. 브리지 시뮬레이션)
고해상도 엔코더
사용자 제작 구조. 타사 센서 및 액추에이터의 손쉬운 통합
MATLAB® / Simulink® 용 독립형 Shake Table 소프트웨어 또는 QUARC를 사용하여 제어
지진 데이터의 스케일링 및 재생 지원
통합 안전 기능 및 한계
작동 원리
구조 역학
지진 공학
대역폭 곡선
다른 제어 주제
제품 구성
자율 주행 차 리서치 스튜디오
Shake Table II XY 워크 스테이션을 완료하려면 Shake Table II 장치 2 개와 별도로 판매되는 추가 구성 요소가 필요합니다.
Simulink의 경우
MATLAB® / Simulink® 용 QUARC 애드온
2x Quanser AMPAQ-PWM 앰프
다음 DAQ 디바이스 옵션 중 하나 :
제품 사양
| 치수 (L x W x H) | 61cm x 46cm x 25.4cm |
| 총 질량 | 54.4 킬로그램 |
| 페이로드 영역 (L x W) | 약 46cm x 46cm |
| 1g¹에서 최대 탑재량 (X 축, 하단) | 34.7 킬로그램 |
| 2.5 g¹에서 최대 하중 (Y 축, 상단) | 7.5 키로그램 |
| 최대 여행 (X 및 Y) | ± 7.62 cm |
| 운영 대역폭 ¹ | 10Hz |
| 최대 속도 (7.5 kg 페이로드를 사용하는 X 및 Y) ¹ | 39.9 cm / 초 |
| 최대 가속도 (X 축, 34.5kg 페이로드) ¹ | 1g |
| 최대 가속도 (Y 축, 7.5kg 탑재량) ¹ | 2.5 그램 |
| 리드 스크류 피치 | 1.27cm / 회전 |
| 서보 모터 파워 | 400W |
| 증폭기 최대 연속 전류 | 12.5 A |
| 모터 최대 토크 | 7.82 Nm |
| 리드 스크류 엔코더 분해능 (구적법) | 8192 카운트 / 레브 |
| 유효 스테이지 위치 분해능 (구적법) | 1.55 μm / 개 |
| 가속도계 범위 | ± 49m / s² |
| 가속도계 감도 | 1.0 g / V |
MatLab, Labview를 기반으로 한 구조동력학, 지진공학
Quanser shake tableⅡ XY를 이용하여 연구한 논문 List
유사제품 성능 비교표